Recognition of Reflective Manufactured Object in non Controlled Complex Environment
Work developed by Qinglin LU, PhD Thesis, Dec. 2015
Abstract:
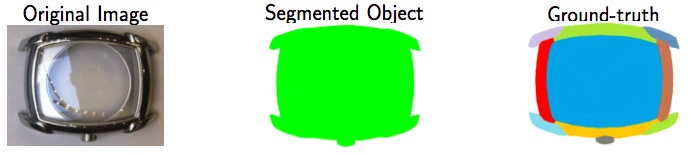
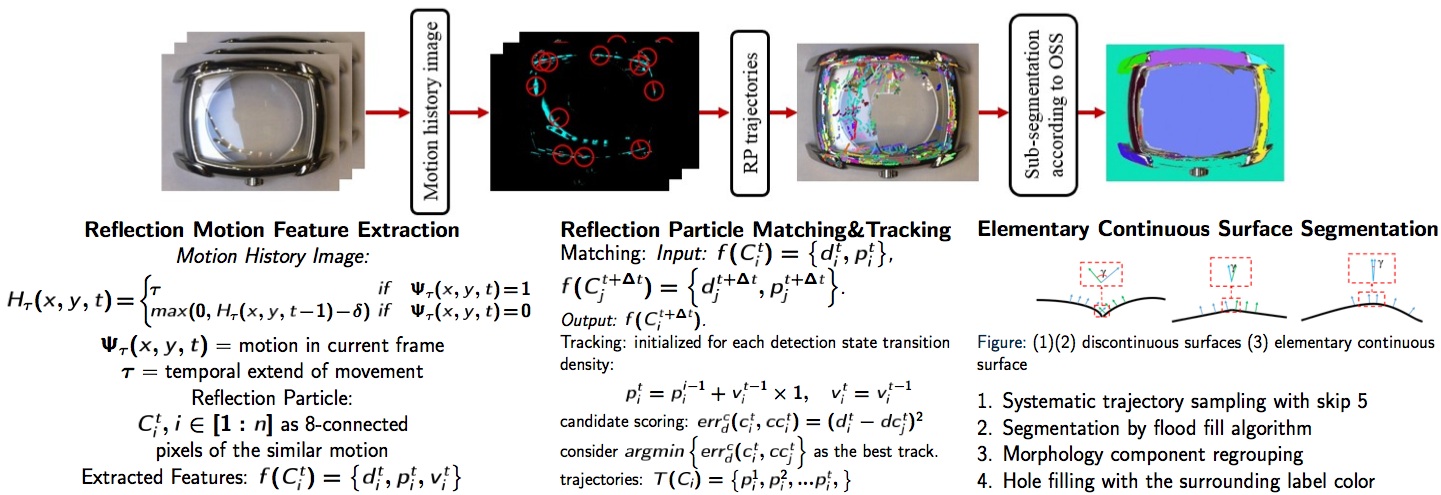
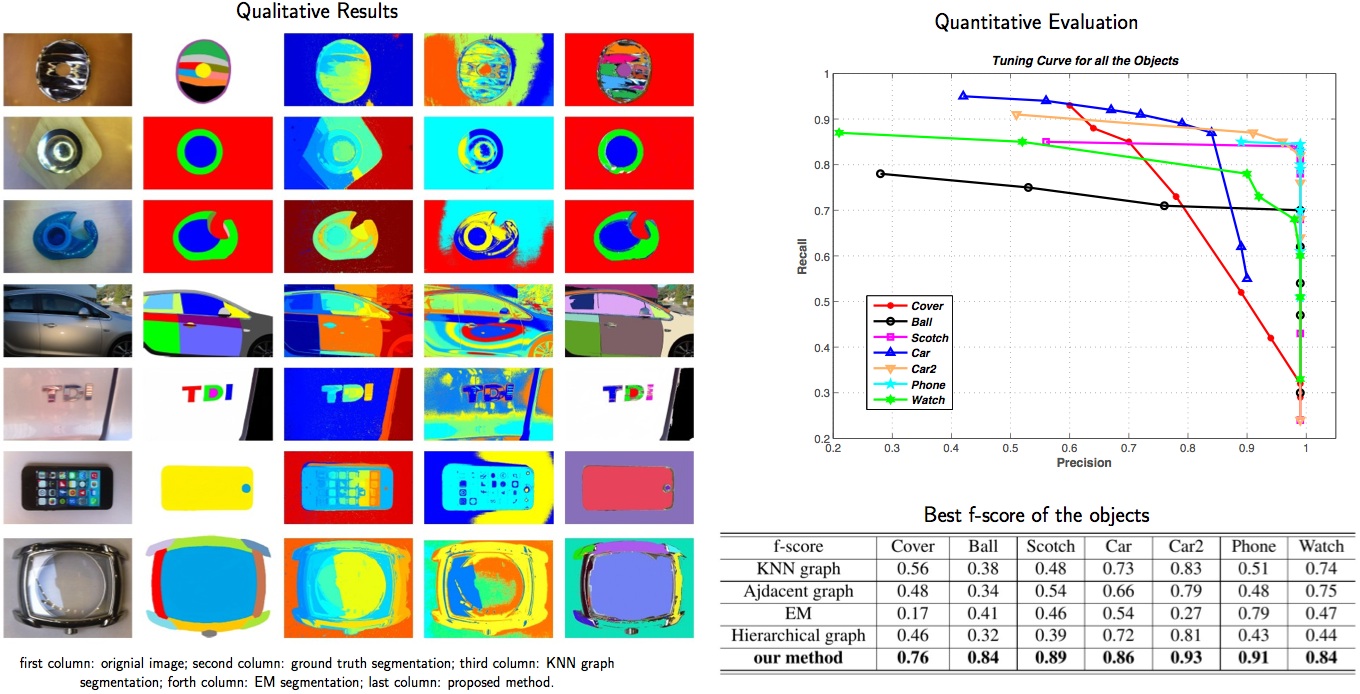
Reflection from reflective surface has been a long-standing problem for object recognition, it brings negative effects on objects color, texture and structural information. Because of that, it is not a trivial task to recognize the surface structure affected by the reflection, especially when the object is entirely reflective. Most of the time, reflection is considered as noise. In this paper, we propose a novel method for entire reflective object sub-segmentation by transforming the reflection motion into object surface label. Instead of considering the reflection as noise, our approach takes reflection as an advantage for understanding the surface structure of the entire reflective objects. The experimental results on specular and transparent objects show that the surface structures of the reflective objects can be revealed and the segmentation based on the surface structure outperforms the approaches in literature.
Motivations:
- The surface structure graph of an object is a highly representative feature.
- Reflection ruins the features as color, texture, and contour.
- Take advantage of reflection instead of removing it.
- Segment elementary continuous surfaces to obtain graph representation.
Reflective Object sub-segmentation (see poster):
Results and Evaluation (see poster):
PhD Thesis ![]()
International Journal:
- Q. Lu, E. Fauvet, A. Zakharova, O. Laligant : ”Entire Reflective Object Structure Understanding,” ELSEVIER: Pattern Recognition Letters, 2015.

International Conference:
- Q. Lu, O. Laligant, E. Fauvet, A. Zakharova : ”Entire Reflective Object Structure Un- derstanding based on relfection motion features,” IEEE Proceeding: British Machine Vision Conference (BMVC’15), Swansea, UK, 2015.
- Q. Lu, O. Laligant, E. Fauvet, A. Zakharova : ”Manufactured Object Sub- Segmentation based on Reflection Motion Estimation,” IAPR Machine Vision and Applications (MVA’15), Tokyo, Japan, 2015.
- Q. Lu, O. Laligant, E. Fauvet, A. Zakharova : ”Local Surface Curvature Analysis based on Reflection Estimation,” SPIE Proceding: International Conference of Dig- ital Image Processing (ICDIP’15), Los Angeles, USA, 2015.
- Q. Lu, O. Laligant, E. Fauvet, A. Zakharova : ”Local Surface Orientation Analysis,” SPIE Proceding: Quality Control by Artificial Vision (QCAV’15), Le Creusot, France, 2015.